カリキュラム
それぞれの科目の詳細は、シラバス(授業内容、評価方法、スケジュールなどの計画書)に記載されています。
下記サイトより検索してください。
ロボット設計コース
カリキュラム表(専門科目)
| 1年次 | 2年次 | 3年次 | 4年次 | |||||
|---|---|---|---|---|---|---|---|---|
| 前期 | 後期 | 前期 | 後期 | 前期 | 後期 | |||
| 必修 (19科目) |
線形代数学I[2] 微分積分学I[2] 機械標準製図法[2] ロボット工作基礎I[2] 力学[2] コンピュータ科学基礎[2] |
プログラミングI[2] ロボット工作基礎II[2] 基礎材料力学[2] 剛体の力学[2] 電気回路I[2] |
プログラミングII[2] CAD/CAE/CAM 実習[2] 機械要素設計[2] 基礎制御工学[2] |
ロボット工学実験I[2] | ロボット設計製図[2]★ |
卒業研究ゼミナール[1] ロボット創成実験[2] |
卒業研究[6] | |
| 選択 (28科目) |
物理学I[2] |
線形代数学II[2] 微分積分学II[2] 物理学II[2] |
微分方程式[2] 材料力学[2] 加工学[2] 電気回路II[2] |
ベクトル解析[2] 確率統計学[2] 機械力学[2] 基礎数値解析[2] デジタル電子回路[2] 制御工学[2] ロボット機構学[2] |
科学技術英語I[2] 数値解析[2] ロボットインタフェース[2] メカトロニクス[2] ロボット工学[2] ビークルシステム学[2] 知能情報工学[2] |
科学技術英語II[2] 知的財産管理[2] 流れ学[2] 生体工学[2] 計測・センサ工学[2] アクチュエータ工学[2] ロボットビジョン[2] |
- | |
- ★…ロボット設計コースのみ開講
- カリキュラムは2026年度のものです。2027年度は変更になる場合があります。
カリキュラムマップ
カリキュラムツリー
ロボット制御コース
カリキュラム表(専門科目)
| 1年次 | 2年次 | 3年次 | 4年次 | |||||
|---|---|---|---|---|---|---|---|---|
| 前期 | 後期 | 前期 | 後期 | 前期 | 後期 | |||
| 必修 (20科目) |
線形代数学I[2] 微分積分学I[2] 機械標準製図法[2] ロボット工作基礎I[2] 力学[2] コンピュータ科学基礎[2] |
プログラミングI[2] ロボット工作基礎II[2] 基礎材料力学[2] 剛体の力学[2] 電気回路I[2] |
プログラミングII[2] 基礎制御工学[2] CAD/CAE/CAM 実習[2] |
ロボット工学実験I[2] 制御工学[2] |
ロボット工学実験II[2]★ |
卒業研究ゼミナール[1] ロボット創成実験[2] |
卒業研究[6] | |
| 選択 (29科目) |
物理学I[2] |
線形代数学II[2] 微分積分学II[2] 物理学II[2] |
微分方程式[2] 機械要素設計[2] 材料力学[2] 加工学[2] 電気回路II[2] |
ベクトル解析[2] 確率統計学[2] 機械力学[2] 基礎数値解析[2] デジタル電子回路[2] ロボット機構学[2] |
科学技術英語I[2] 数値解析[2] ロボットインタフェース[2] メカトロニクス[2] ロボット工学[2] ビークルシステム学[2] 知能情報工学[2] |
科学技術英語II[2] 知的財産管理[2] 流れ学[2] 生体工学[2] 計測・センサ工学[2] アクチュエータ工学[2] ロボットビジョン[2] |
- | |
- ★…ロボット制御コースのみ開講
- カリキュラムは2026年度のものです。2027年度は変更になる場合があります。
カリキュラムマップ
カリキュラムツリー
授業ピックアップ
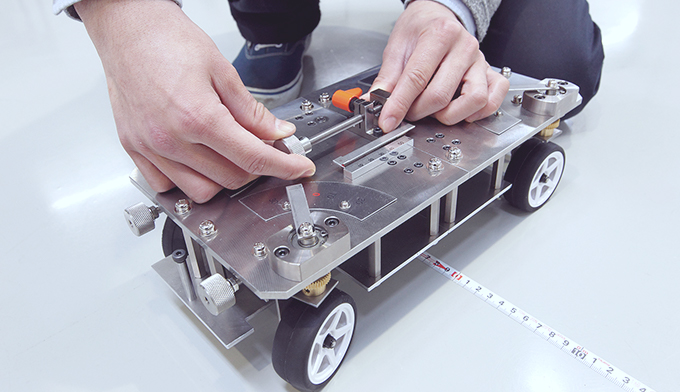
ロボット工作基礎I・II
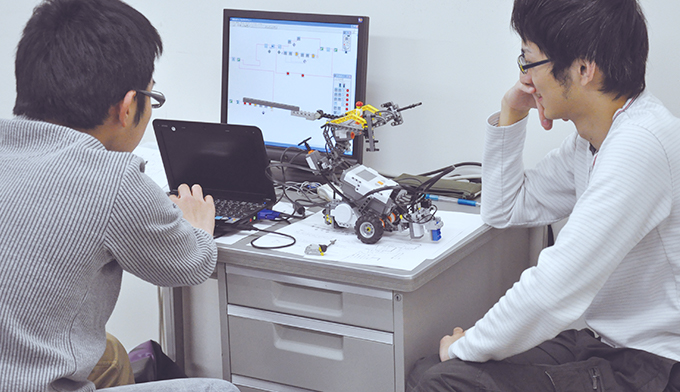
初歩的な自動車型ロボットを実際に組み立てることで、ロボットとはどういうものか、その仕組みを理解するための講義です。動作させるためのプログラムも学んでいきます。
CAD/CAE/CAM実習
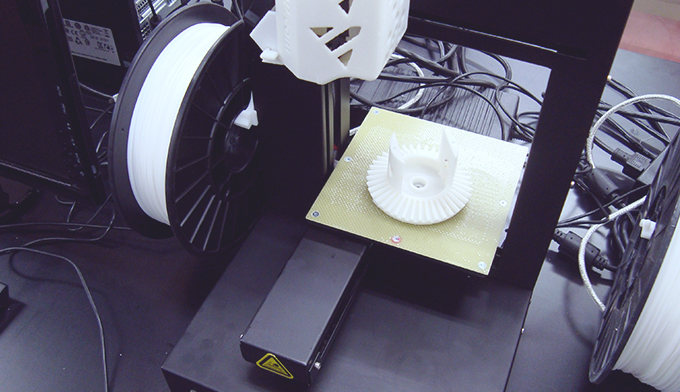
歯車などロボットで使用するパーツを自ら設計する演習です。コンピュータ上で設計したパーツを3Dプリンタなどの自動加工機を利用して製作します。
ロボット工学実験I
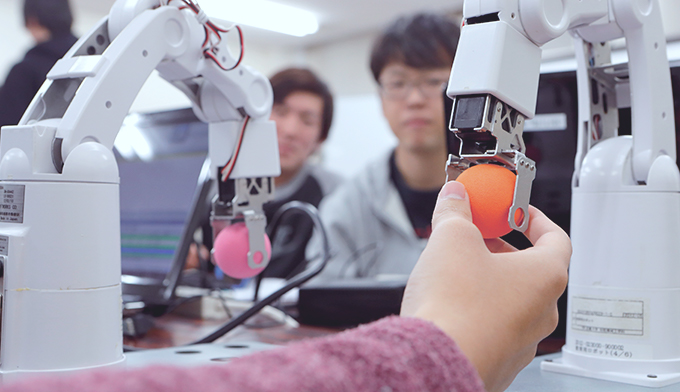
この実験ではロボットアームの制御、フィードバック制御系設計、マイコンプログラミング、自動車の運動をテーマに、座学で学んだ知識を実習を通してより深めます。
ロボット創成実験
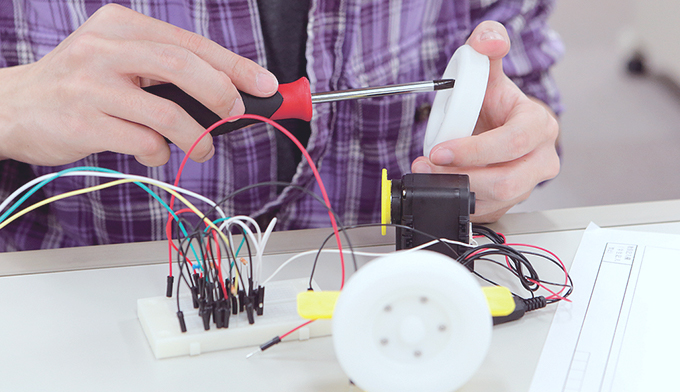
ロボットを自律的に動かすためのプログラムや、モーターやセンサーが動作する仕組みを実地で学びながら、最終的には自分でロボットを組み立てて、学科内でロボットコンテストを行います。
ロボット工学
ロボットづくりに必要となる機構設計・力学・計測・制御などの基礎理論をさまざまな講義で学習します。
ロボット工学の講義では、これらを統合化した知識を育みます。
ロボットビジョン
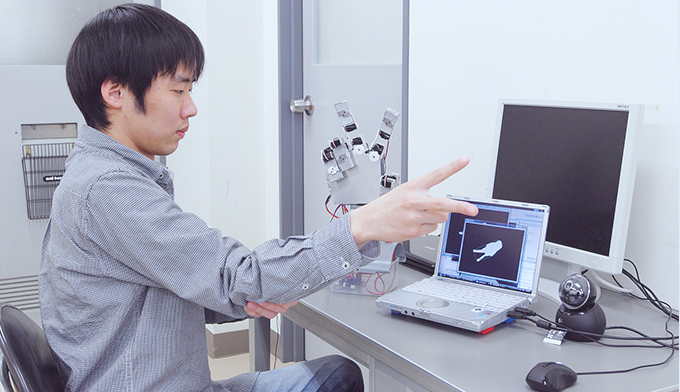
手の形や肌の色など、カメラが捉えた映像をロボットにどのように認識させ、どんな反応をさせるか、画像処理工学などを応用した技術と知識を学びます。