教員・研究員紹介
- 天野 亮 (あまの りょう)
- 助教 博士(工学)
- 所属学科/電気電子通信工学科
- 研究キーワード:
- 組込みシステム/シミュレーション/制御
ロボットなどを思い通りに動かすことを制御といい、その制御に関する理論的な研究をしています。また、コンピュータを用いて実際のものを制御する応用的な研究も行っています。
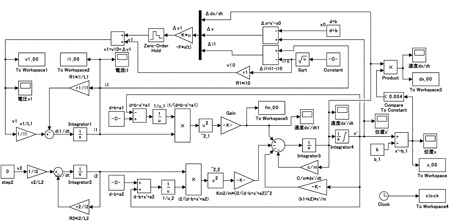
制御系のコンピュータシミュレーション
| 専門 | 制御理論とその応用 |
|---|---|
| 担当科目(学部) | 近大ゼミ1・2、電気回路II(電気工学II)、プログラミング実習I・II、電気電子通信工学実習、制御工学、電子情報通信実験、卒業研究ゼミナール、卒業研究 |
| 主な研究テーマ | システムの低次元化 パルスファイバレーザーの高出力化のための光路長制御 |
| 代表的な研究業績 |
パルスファイバレーザーの高出力化を目的とした光路長の自動制御, 電気学会論文誌C, Vol.139, No.1, pp.113~118 (2019) 1次・2次情報を用いたモデル低次元化, システム制御情報学会論文誌, Vol.16, No.3, pp.144~146(2003) |
| researchmap | https://researchmap.jp/read0058336 |
| 所属学協会 | 計測自動制御学会、システム制御情報学会、IEEE、電気学会 |
| 出身大学 | 近畿大学 |
| 論文名、取得大学、取得年月 | 補間による線形離散時間システムの低次元化と実現に関する研究、近畿大学、1998年3月 |
| 主な経歴 | 平成10年近畿大学大学院工学研究科電子工学専攻博士後期課程修了、現在近畿大学理工学部電気電子工学科助教 |
| 学生へのアドバイス | 自由に使える時間が沢山ある学生生活を、勉学以外のことにも興味をもって有意義に使ってください。 |
| 趣味・その他 | スターウォッチング、天体写真撮影 |
ディジタル制御研究室
| 教員室 | 31号館7階ディジタル制御研究室 |
|---|---|
| 内線 | 4557 |
| メールアドレス | amano(at)ele.kindai.ac.jp
|