
本学部のロボット研究会が「レスキューロボットコンテスト2024」にてアイデア賞を受賞
2024.09.02
2024年8月10日(土)、8/11(日)に神戸市(神戸サンボーホール)で行われた「レスキューロボットコンテスト2024」に本学部のロボット工作研究会も参加し、アイデア賞を受賞しました。

前例左より、電気電子工学科1年井上悠大さん、情報学科3年吉田清哉さん、電気電子工学科1年松友海音さん、
後列左より、情報学科4年山本澪さん、電気電子工学科3年谷平学飛さん、情報学科3年端祐太朗さん、情報学科3年平良宰史さん、電気電子工学科2年森田洋輔さん
レスキューロボットコンテスト2024
アイデア賞2024.pdf
〜ロボットの特徴〜
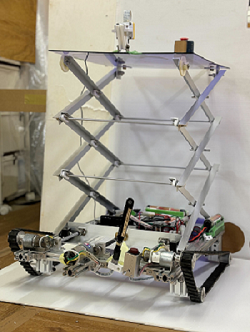
1号機「イリーダ」
機体の上部にリフト機構を搭載。リフトの上下移動により、競技フィールドの2階エリアに支援物資を運んだり、2階の要救助者を乗せて搬送が可能。実際の災害現場では例えば高層ビルで火災が発生した際に、上の階に取り残された要救助者をベランダから救助することを想定している。
今後の方針として、支援物資提供と要救助者の搬送に加えて、別のロボットを2階に送れるよう機能面、耐久面を強化する予定。
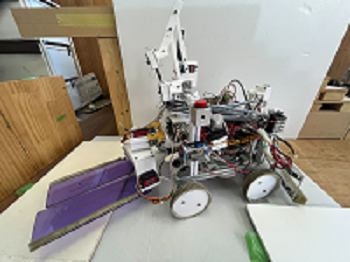
2号機「デリバー」
狭い場所で活躍する小型の救助号機。スカートでガレキを左右にかき分けながら進み、救助アームで要救助者を優しく救助する。今後は更に小型化・軽量化を実現して1号機のリフトで2階に上げれるように改良予定。
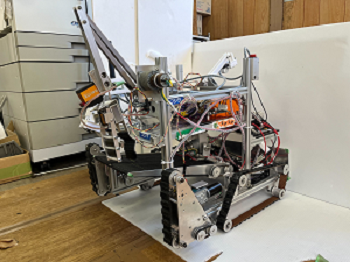
3号機「ソティラス」
クローラに加えて前にアームクローラを取り付けることで階段や段差の安定走行が可能となった。アームクローラにはポテンショメータを取り付けることで、傾きの角度を計測し、ボタン1つで適切な角度に調整可能となった。
〜救助の流れ〜
①1号機がリフトを活かした高い視点から現場の様子を確認、ガレキを除去しながら進行。
②2、3号機出動。2号機は狭い部屋の探索・救助。3号機は1階の探索→階段を登って2階へ
③3号機が2階に到着。1号機のリフトから支援物資を受け取り、要救助者に提供。要救助者を救助し、リフトに乗せる。
④1号機はリフト上の要救助者を安全な場所へ搬送。他の探索・救助を終えた2、3号機も帰還し、救出完了となる。